1. Основные сведения из векторной алгебры
 1.6. Декартов базис
1.6. Декартов базис 
Если векторы

,

,

взаимно ортогональны и по модулю равны
единице, то они называются
ортами прямоугольной декартовой системы координат, а сам
базис
ортонормированным декартовым базисом. Орты декартовой системы координат обычно
обозначают как

,

,

. Согласно определению
 |
(1) |
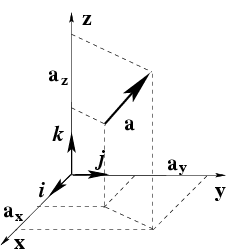
Главная особеннность декартовых базисов состоит в том, что координаты любого вектора
в этом базисе равны проекциям этого вектора на три взаимно ортогональных направления,
определяемых ортами. Эти направления называют координатными осями декартовой системы
координат (рис.
9): оси

,

и

. Точка пересечения координатных осей
0 называется началом координат. Тогда
Рис.9 Декартова система координат
где проекции вектора

определены как
 |
(2) |
Если орты декартовой системы координат связаны между собой следующими соотношениями
![$\displaystyle [{\mathbf i},{\mathbf j}]={\mathbf k},\quad [{\mathbf j},{\mathbf k}]={\mathbf i},\quad [{\mathbf k},{\mathbf i}]={\mathbf j},\quad$](img145.png) |
(3) |
то такая система координат называется
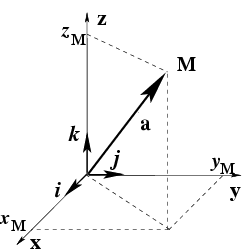
правой. В заданной декартовой системе координат
для каждой точки пространства можно ввести так называемый радиус-вектор

- направленный
отрезок, начинающийся в начале координат и заканчивающийся в данной точке. Координаты радиус-вектора
совпадают с декартовыми координатами соответствующей точки (
рис. 10):
 |
(4) |
Рис.10. К определению радиус-вектора
Модуль радиус-вектора
равен расстоянию от начала координат до точки. Отметим следующее.
Вектор
как направленный отрезок не зависит от системы координат, от выбранного базиса
зависят его координаты. Радиус-вектор точки

-

"привязан" к системе координат и
зависит от выбора начала координат. Отметим также, что три орта
,
,
декартовой системы координат и определяемые ими координатные оси полностью эквивалентны. Выражения
(
1)-(
4) аналогичны для каждого орта. Поэтому, для сокращения записи введем
следующие обозначения:
![\begin{displaymath}\begin{array}{ccc} {\mathbf i}\equiv{\mathbf e}_1 & x \equiv ...
...bf e}_3 & z \equiv x_3 & a_z \equiv a_3. \\ [0.5em] \end{array}\end{displaymath}](img151.png) |
(5) |
Тогда, декартов базис - это тройка векторов
 |
(6) |
Координаты вектора
запишутся как:
 |
(7) |
и т. д. В дальнейшем будет рассматриваться только трехмерное пространство, поэтому, если
специально не указано, то индексы будут принимать значения 1, 2, 3. Например,

- это
какая-то из трех координат радиус-вектора
, как принято в (
5).
В новых обозначениях разложение вектора
по декартовому базису

запишется
как
 |
(8) |
а радиус-вектора
 |
(9) |
В этих выражениях индексы

уже не свободны, это индексы суммирования и от них правая часть
не зависит (их можно обозначить как угодно), что видно по левой части, где находится вектор.
Это соответствие будет выполняться всегда и поэтому нет необходимости писать знак суммы

,
а для таких выражений принято
правило суммирования Эйнштейна: если выражение с индексами
содержит парные индексы, то по ним предполагается суммирование (в 3-х мерном пространстве значения индексов
изменяются от 1 до 3). Тогда, разложения вектора
(
8)
и радиус-вектора
(
9) запишутся в сокращенной форме как
 |
(10) |
При использовании этого правила следует следить, чтобы количество свободных индексов в правой
и левой частях выражения было одинаковым и не менялось при выполнении каких-либо преобразований.
Например, из (
1) следует, что
. Иногда индекс суммирования
может быть
свернут арифметическим действием. Так,

следует понимать как
, так как
.